Scalar quantization is a vector compression technique that stores each embedding dimension with fewer bits, most commonly by converting 32-bit floating-point values into 8-bit integers. In AI databases, this can reduce raw vector memory by about 4x while keeping recall loss small for many retrieval workloads, especially when the system keeps enough candidates and re-scores the best matches with higher-precision data. Unlike product quantization, scalar quantization does not need a learned codebook, which makes it simpler to understand, configure, and operate.
This guide explains how scalar quantization works, why per-dimension float-to-int8 compression is useful for vector search, where the 4x memory savings come from, why recall can remain strong, and how re-scoring strategies help recover accuracy. By the end, you should understand when scalar quantization is a good fit for an AI database and what tradeoffs to evaluate before using it in a retrieval system.
What Scalar Quantization Means in Vector Search
Scalar quantization reduces the precision of individual numeric values inside a vector. A vector embedding is usually an array of floating-point numbers, where each number represents one dimension of semantic information learned by an embedding model. If an embedding has 768 dimensions, the database stores 768 numeric values for each object. Scalar quantization compresses those values one by one rather than grouping dimensions together or replacing vector segments with cluster IDs.
In the most common AI database use case, the original vectors are stored as float32 values. A float32 value uses 32 bits, or 4 bytes, per dimension. Scalar quantization maps each dimension into a smaller representation such as int8 or uint8, which uses 8 bits, or 1 byte, per dimension. The vector is still the same length, but each coordinate takes less memory.
The word scalar matters because the compression is applied at the level of a single scalar value. This is different from techniques that compress a whole subvector, learn centroids, or use multiple codebooks. Scalar quantization is therefore easier to reason about: each dimension is compressed according to a numeric range and later used directly for approximate distance calculations.
Once you see scalar quantization as precision reduction rather than dimensionality reduction, the next question is how the float-to-int conversion actually works. The conversion is simple in principle, but the details of the numeric range determine how much information is preserved.
How Per-Dimension Float-to-Int8 Compression Works
Per-dimension float-to-int8 compression maps continuous floating-point values into a limited set of integer buckets. An 8-bit integer can represent 256 possible values. Instead of storing the exact float32 number for a dimension, the database stores the nearest 8-bit bucket value that represents it well enough for search.
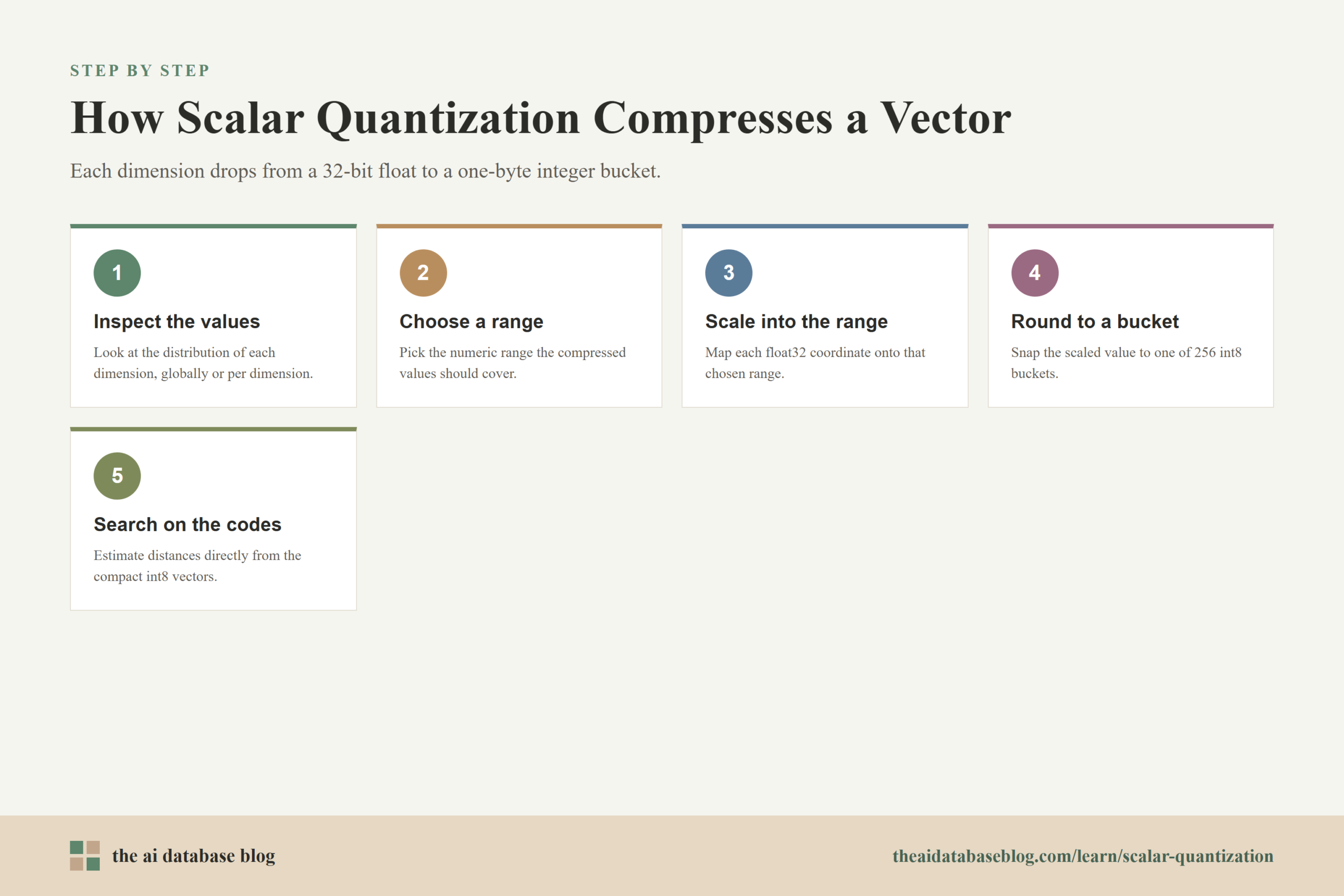
A simplified scalar quantization process looks like this:
- The system examines the distribution of vector values, either globally or per dimension.
- It chooses a numeric range that the compressed values should represent.
- Each float32 value is scaled into that range.
- The scaled value is rounded into an 8-bit integer bucket.
- During search, distances are estimated using the compressed representation, sometimes with fast CPU instructions designed for 8-bit arithmetic.
A per-dimension range can preserve more detail when different dimensions have different value distributions. For example, one embedding dimension may usually range from -0.2 to 0.2, while another may range from -1.5 to 1.5. If both dimensions use the same global range, the narrower dimension may waste many available buckets. If each dimension has its own range, the integer buckets can be used more efficiently.
The exact implementation varies by database and index type, but the core idea is consistent: replace expensive high-precision coordinates with compact low-precision coordinates while preserving enough geometry for nearest-neighbor search. The compressed vector is not a perfect copy of the original. It is an approximation designed to keep the relative similarity ordering mostly intact.
This compression step is useful because vector search systems often become memory-bound before they become storage-bound. Once an index grows to millions or billions of embeddings, shaving bytes from every dimension can change both cost and performance.
Where the 4x Memory Savings Come From
The 4x memory savings claim comes from the difference between float32 and int8 storage. A float32 value uses 4 bytes. An int8 value uses 1 byte. If every dimension in a vector is converted from float32 to int8, the raw vector payload becomes one quarter of its original size.
For a 768-dimensional embedding, the raw vector storage changes like this:
- Float32 storage: 768 dimensions multiplied by 4 bytes equals 3,072 bytes per vector.
- Int8 storage: 768 dimensions multiplied by 1 byte equals 768 bytes per vector.
- Raw vector reduction: 3,072 bytes divided by 768 bytes equals 4x smaller vector storage.
At small scale, this may look like a neat optimization. At large scale, it can decide whether an index fits in memory. A collection with 100 million 768-dimensional vectors would require roughly 307 GB for raw float32 vector values alone, before index overhead, metadata, replication, or storage format overhead. With int8 scalar quantization, the raw vector values would be roughly 77 GB.
However, raw vector compression is not always the same as total index compression. Many AI databases use approximate nearest neighbor indexes such as HNSW, which include graph structures, neighbor lists, object identifiers, and other metadata. Scalar quantization compresses the vector values, but it may not compress every part of the index. In practice, total memory savings can be lower than 4x when graph or metadata overhead is a large share of the index.
The practical takeaway is that scalar quantization gives a strong reduction in vector memory, but capacity planning should consider the full index, not only the embedding array. That distinction matters because memory savings are valuable only if they preserve the quality and latency profile the application needs.
Why Recall Loss Is Often Minimal
Recall measures how many of the relevant or true nearest results are returned by the search system. Scalar quantization can reduce recall because it changes the stored vector values, which can slightly change distance calculations. The important point is that int8 quantization usually keeps much more information than more aggressive compression methods, so the similarity order often remains close to the float32 baseline.
Many embedding values do not need full 32-bit precision for retrieval. Vector search is usually trying to find approximately nearest neighbors, not reconstruct the exact original embedding. If the compressed representation preserves the broad direction and relative distances of vectors, the search results can remain very similar to full precision results.
Recall loss tends to be minimal when the embedding distribution is well behaved, the quantization ranges are chosen carefully, and the index is tuned for the workload. Higher-dimensional embeddings often tolerate moderate precision reduction because similarity is spread across many coordinates. A small error in one dimension may not meaningfully change the total score if the rest of the vector remains informative.
That does not mean scalar quantization is risk-free. Recall can drop more noticeably when vectors have unusual value distributions, when the quantization range clips outliers poorly, when the application requires very fine ranking distinctions, or when the candidate pool is too small. The only reliable way to know the impact is to test against a representative evaluation set using metrics such as recall at k, nDCG, mean reciprocal rank, and task-level answer quality for retrieval-augmented generation.
Because scalar quantization preserves the original vector shape and only reduces numeric precision, it has a simpler accuracy profile than methods that reshape or cluster the vector space. This simplicity is one reason it is often chosen as a first compression step before more aggressive techniques are considered.
Why Scalar Quantization Does Not Need a Codebook
Scalar quantization does not need a codebook because it does not represent groups of dimensions with learned centroid IDs. It maps each scalar value into an integer bucket according to a numeric range. The information needed to interpret the compressed vector is usually a set of scaling parameters, such as minimum and maximum values or similar range statistics, rather than a trained table of vector prototypes.
This is different from product quantization. Product quantization splits a vector into subvectors, learns representative centroids for each subspace, and stores the ID of the nearest centroid. Those centroids form a codebook. The codebook can produce much higher compression, but it introduces a training step, codebook quality concerns, and additional configuration choices such as the number of segments or centroids.
Scalar quantization is therefore operationally simpler. There is less to train, fewer moving parts, and fewer ways for compression quality to depend on whether the training sample represents the full dataset. The database still needs to know how values were scaled and encoded, but it does not need to learn a vocabulary of representative vector chunks.
This no-codebook property is especially useful when teams want a straightforward memory reduction without changing the shape of the retrieval system. It also makes scalar quantization easier to explain to application teams: the vectors are still vectors of the same dimensionality, just stored with lower precision.
How Re-Scoring Recovers Search Quality
Re-scoring is the most important companion strategy for scalar quantization. The compressed index is used to find a candidate set quickly and cheaply. Then the system recalculates scores for the best candidates using a more accurate representation, such as the original float32 vectors or a higher-precision version stored separately. This lets the database benefit from compact search while reducing the chance that compression noise changes the final ranking.
A typical re-scoring flow works like this:
- The query vector is compared against the compressed int8 index.
- The database retrieves more than the final number of requested results.
- The candidate set is re-scored using higher-precision vectors or more exact distance calculations.
- The final top results are returned after the more accurate ranking step.
For example, if an application needs the top 10 results, the database might first retrieve 50 or 100 compressed candidates. It can then re-score those candidates with float32 vectors and return the best 10 after refinement. This approach works because the compressed search usually needs to find a good candidate pool, not produce the perfect final ranking by itself.
Oversampling and re-scoring are closely related. Oversampling increases the number of candidates retrieved from the compressed index. Re-scoring improves the ranking of those candidates. If the candidate pool is too small, re-scoring cannot recover relevant results that were never retrieved. If the candidate pool is large enough, re-scoring can often correct small ordering errors introduced by int8 approximation.
The tradeoff is latency and memory. Keeping original vectors available for re-scoring uses extra storage or memory, and re-scoring more candidates adds compute work. For many AI database workloads, this is a worthwhile exchange because it allows the main index to stay compact while the final result quality remains close to full precision.
Common Re-Scoring Strategies
Re-scoring is not a single technique. It is a family of strategies for balancing compressed search speed with final ranking accuracy. The right choice depends on the workload, the size of the dataset, the required recall, and whether the system can afford to keep full vectors available for refinement.
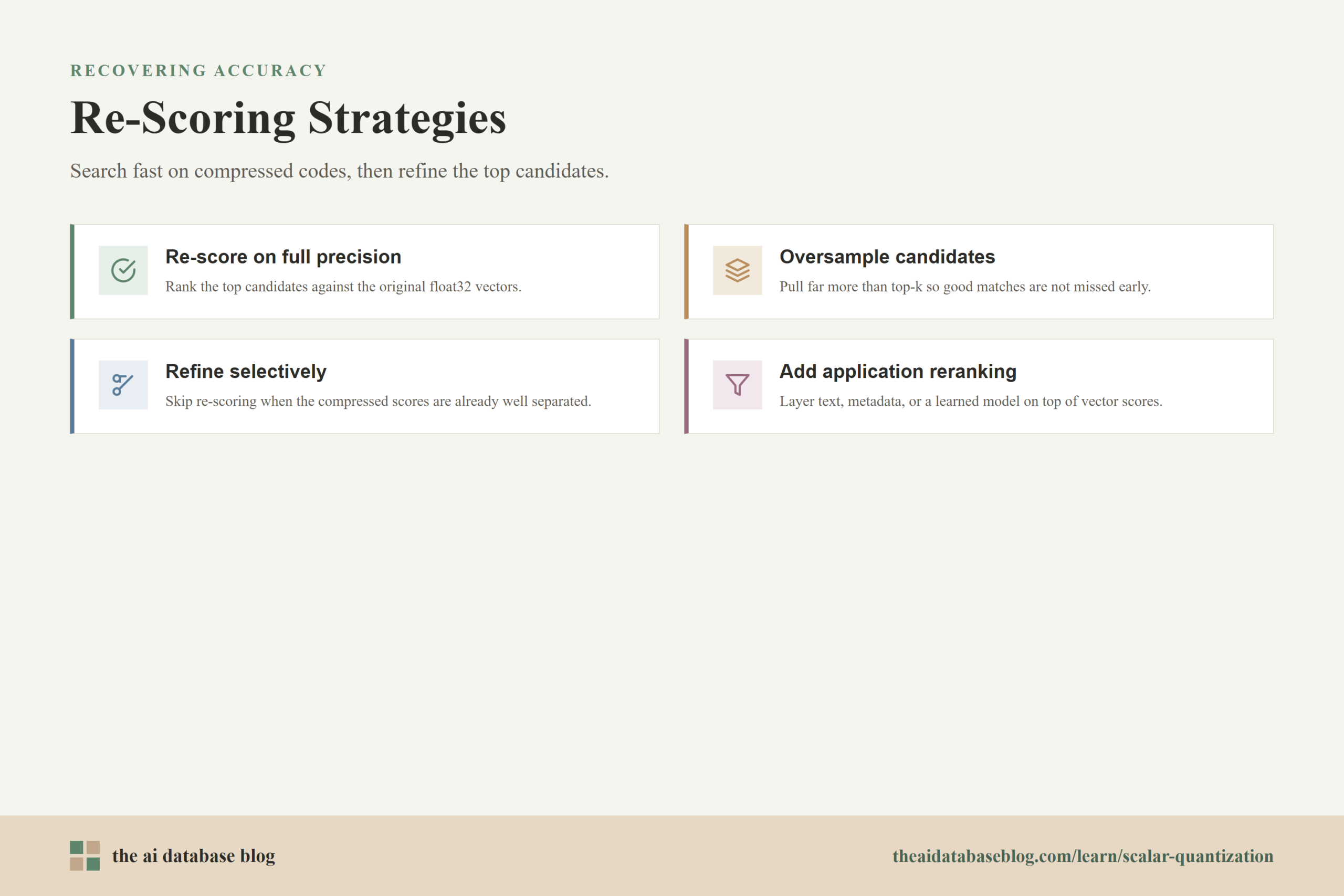
Store Full-Precision Vectors for Final Ranking
The most direct strategy is to search the compressed index first and then re-score the top candidates against the original float32 vectors. This usually gives the best recovery because the final ranking uses the same representation as the uncompressed baseline. It is useful for retrieval-augmented generation, semantic search, and recommendation systems where the top few results matter more than returning a very large result set.
Use Oversampling to Protect Recall
Oversampling means retrieving more candidates than the user requested. If the final answer needs 10 results, the system might retrieve 5x or 10x that number from the compressed index before re-scoring. Larger oversampling factors usually improve recall but increase compute cost. The best value should be chosen through evaluation rather than guesswork.
Apply Re-Scoring Selectively
Some systems do not need re-scoring for every query. If the top compressed scores are clearly separated, the result may already be stable. If many candidates have similar scores, re-scoring can be more valuable. A selective strategy can reduce latency by applying refinement only when the ranking is likely to be sensitive to quantization error.
Combine Vector Re-Scoring with Application-Level Reranking
In retrieval systems, vector re-scoring can be followed by additional reranking based on text relevance, metadata, freshness, permissions, or a learned ranking model. Scalar quantization handles the memory and search-efficiency layer. Application-level reranking handles business or task-specific relevance. These are separate steps, but they often work well together.
Once re-scoring is included, scalar quantization becomes less like a risky loss of precision and more like a staged retrieval design. The first stage is optimized for scale. The second stage is optimized for accuracy. That staged approach is common in practical AI database architecture.
When Scalar Quantization Is a Good Fit
Scalar quantization is a good fit when vector memory is a major cost or performance constraint, but the application still needs strong retrieval quality. It is especially useful for large embedding collections, high-dimensional vectors, and workloads where approximate candidate generation followed by re-scoring is acceptable.
Strong use cases include semantic search over large document collections, RAG retrieval where only the top few chunks are passed to a language model, recommendation candidate generation, duplicate detection, and similarity search where slight score differences are less important than finding a high-quality candidate set. In these workloads, the system can often tolerate a small approximation in the first search stage.
Scalar quantization may be less suitable when exact numeric distances are required, when the application returns very small candidate pools without re-scoring, or when the embedding distribution produces large quantization error. It can also be less attractive if the deployment already has enough memory and the main bottleneck is elsewhere, such as metadata filtering, network transfer, document loading, or downstream model latency.
The practical decision is not simply whether scalar quantization is good or bad. The decision is whether it improves the system’s cost, capacity, and latency while keeping retrieval quality above the threshold required by the application.
How to Evaluate Scalar Quantization
The safest way to evaluate scalar quantization is to compare it against a full-precision baseline using representative queries and real relevance judgments. Compression should not be judged only by memory savings. It should be judged by whether the application still retrieves the right information under realistic conditions.
A useful evaluation should include:
- Memory usage: Measure both raw vector storage and total index memory, because graph and metadata overhead can reduce the apparent savings.
- Recall at k: Check how many of the baseline nearest neighbors still appear in the compressed results.
- Ranking quality: Use metrics such as nDCG or mean reciprocal rank when result order matters.
- Latency: Measure compressed search alone and compressed search with re-scoring, since refinement adds work.
- Task quality: For RAG, inspect answer quality, citation quality, and whether important context is missing from retrieved chunks.
- Filter behavior: Test metadata filters and hybrid search paths, because compression is only one part of the retrieval plan.
It is also important to test multiple oversampling settings. A low oversampling value may be fast but lose relevant candidates. A high value may recover recall but reduce the latency benefit. The best setting is usually the smallest value that meets the application’s quality target.
Evaluation turns scalar quantization from a theoretical compression feature into an engineering decision. The goal is not to prove that int8 is always enough. The goal is to find the point where the system saves meaningful memory while preserving the retrieval behavior users depend on.
FAQs
1. What is scalar quantization in an AI database?
Scalar quantization is a way to compress vector embeddings by storing each dimension with lower precision. Instead of keeping every coordinate as a 32-bit floating-point value, the database stores it as a smaller value such as an 8-bit integer. This reduces memory usage while keeping the vector’s overall structure mostly intact for similarity search.
2. Why does int8 scalar quantization save about 4x memory?
Float32 values use 4 bytes per dimension, while int8 values use 1 byte per dimension. If every vector coordinate is converted from float32 to int8, the raw vector data becomes one quarter of the original size. Total index memory may shrink by less than 4x because the index can also contain graph structures, identifiers, metadata, and other overhead.
3. Does scalar quantization always reduce recall?
Scalar quantization can reduce recall because compressed values are approximate, but the loss is often small with int8 compression when the index is tuned well. Recall depends on the embedding model, value distribution, index type, candidate pool size, and whether re-scoring is used. The effect should be measured with a representative evaluation set.
4. Why does scalar quantization not need a codebook?
Scalar quantization does not need a codebook because it compresses each numeric coordinate directly into an integer bucket. Product quantization, by contrast, learns centroids for vector segments and stores codebook IDs. Scalar quantization usually needs scaling or range parameters, but it does not need learned vector prototypes.
5. What is re-scoring in quantized vector search?
Re-scoring is a refinement step after compressed search. The database first uses the quantized index to retrieve a larger candidate set, then recalculates scores for those candidates using higher-precision vectors or more exact distance calculations. This helps restore final ranking quality while keeping the main search stage memory-efficient.
6. When should I avoid scalar quantization?
You should be cautious with scalar quantization when exact distances matter, when the system cannot retrieve enough candidates for re-scoring, or when evaluation shows unacceptable recall loss. It may also be unnecessary if vector memory is not a real bottleneck. The best decision comes from comparing full-precision and quantized retrieval on real queries.
Takeaway
Scalar quantization is a practical way to make AI database indexes smaller by converting each vector dimension from float32 precision to a compact int8 representation. It can provide about 4x raw vector memory savings, often with minimal recall loss when paired with oversampling and re-scoring. This guidance is most useful for engineers and technical teams building large-scale semantic search, RAG, recommendation, or similarity systems where memory cost and retrieval quality both matter. A common use case is compressing a large document embedding index so more vectors fit in memory, then re-scoring the top candidates with higher-precision vectors before sending the best results to an application or language model.
Watch this video to learn more