Metadata filtering lets an AI database search only the vectors that satisfy structured conditions, such as tenant, document type, timestamp, language, access level, product category, or status. The main architectural challenge is that vector search is usually approximate and graph- or partition-based, while metadata filters are exact logical predicates. Fast filtered queries require more than attaching JSON fields to vectors: they need filter indexes, efficient candidate masks, careful interaction with the vector index, and query planning that adapts to how selective the filter is.
This guide explains how metadata filters are evaluated against vector search, how payload indexes make filters fast, how bitmap filtering works, and what engineering decisions keep filtered vector queries reliable at production scale. By the end, you should understand why filtered vector search is harder than ordinary metadata lookup, where latency and recall problems appear, and how AI database systems reduce those problems through index design and execution strategy.
Why Metadata Filtering Matters in Vector Search
Vector search retrieves records by semantic similarity, but most real applications also need boundaries around what can be returned. A support chatbot may need to search only public help articles, a legal assistant may need documents from a specific jurisdiction, and a multi-tenant RAG system must ensure each user only retrieves their own data. In these cases, the vector distance score is not enough. The result must be both semantically relevant and allowed by the metadata constraints.
The metadata may describe the vector itself, the source document, the user or tenant that owns it, the time it was created, the language it uses, or the permissions attached to it. Common filters include equality filters such as tenant_id = 42, set filters such as category IN ("policy", "contract"), range filters such as created_at > 2026-01-01, and boolean combinations such as language = "en" AND visibility = "public".
The reason this becomes architectural is that vector search and metadata filtering answer different questions. Vector search asks, “Which items are nearest to this query embedding?” Metadata filtering asks, “Which items satisfy these exact conditions?” A filtered vector query must combine both without returning too few results, scanning too much data, or breaking the approximation guarantees that make vector search fast.
Once filtering becomes part of retrieval, the next question is where the filter is evaluated. That decision shapes the latency, recall, and operational behavior of the whole system.
How Filters Are Evaluated Against Vector Search
AI databases generally evaluate metadata filters in one of three places: before vector search, after vector search, or during vector search. Each approach is useful in some situations and risky in others. The right choice depends on the size of the dataset, the selectivity of the filter, the vector index type, the requested result count, and whether the system prioritizes recall, latency, or predictable behavior.
Pre-filtering
Pre-filtering first identifies the records that match the metadata condition, then performs vector search inside that eligible subset. In an ideal case, this is efficient because the vector search does not waste work scoring records that could never be returned. For example, if a query is limited to one tenant out of thousands, pre-filtering can dramatically reduce the candidate space.
The challenge is that approximate nearest neighbor indexes are usually built to navigate the whole vector space. A graph index such as HNSW works by walking from neighbor to neighbor through a connected graph of similar vectors. If a filter removes most of the graph from consideration, the search may have trouble reaching the best matching eligible nodes unless the system has filter-aware traversal logic or a fallback path.
Pre-filtering works especially well when the filtered subset is small enough for exact search, when partitions align with common filters, or when scalar indexes can quickly produce an eligible candidate set. It becomes harder when the filtered subset is large but scattered across the vector graph, because the database still needs an efficient way to find the nearest eligible vectors without scanning too broadly.
Post-filtering
Post-filtering runs vector search first, then removes results that do not match the metadata condition. This is simple to implement because the vector index can operate normally. The database retrieves the nearest candidates, checks their metadata, and returns the candidates that pass.
The weakness is that restrictive filters can leave too few results. If the application asks for the top 10 results and the vector search returns 100 candidates, but only 3 match the filter, the user receives an incomplete result set unless the system retries with a larger candidate pool. This can create unpredictable latency because the database may need to over-fetch aggressively for selective filters.
Post-filtering is most acceptable when filters are loose, when result completeness is less critical, or when a second reranking stage will tolerate fewer candidates. It is risky for authorization, tenant isolation, and compliance-sensitive retrieval because the system must be very careful that filtered-out candidates never leak into the application layer.
In-search filtering
In-search filtering evaluates the metadata condition while the vector index is being traversed. Instead of treating filtering as a separate step before or after search, the database checks candidate eligibility during the search process. For a graph index, this can mean checking whether a visited node matches the filter before scoring it, adding it to the result heap, or expanding through it.
This approach is often the most practical for production AI databases because it can preserve the speed of approximate search while respecting filter constraints earlier in execution. It still requires careful design. The system needs fast eligibility checks, a way to avoid wasting distance computations on ineligible records, and enough graph exploration to avoid missing relevant eligible records that are not near the initial traversal path.
Modern filtered vector search often blends these strategies. A query planner may use exact search for a tiny filtered subset, filter-aware approximate traversal for medium subsets, and broader ANN search with post-filter safeguards for less selective filters. The important point is that filtering is not one fixed operation. It is an execution decision made under constraints.
To make any of these strategies fast, the system needs a way to answer the metadata portion of the query without scanning every payload. That is where payload indexes become central.
Payload Indexes and Scalar Metadata Structures
A payload index is an index over the non-vector fields stored with each vector. These fields are often called metadata, scalar fields, attributes, or payload. Without a payload index, a database may need to inspect each candidate’s stored metadata at query time, which becomes expensive when filters are common or when metadata is stored in flexible JSON-like structures. Payload indexes convert filter evaluation from repeated field scanning into indexed lookup.
Different field types need different index structures. Equality filters over low-cardinality fields, such as language or status, are often well suited to bitmap-style indexes. Range filters over timestamps or numeric values may use ordered structures such as B-trees, segment statistics, or range indexes. Text filters may rely on inverted indexes. List-valued fields, such as document tags or access groups, may require indexes that map each value to the records containing it.
Payload indexes are not just an optimization afterthought. In filtered vector search, they directly affect the vector execution path. If the database can quickly produce the set of eligible IDs for a filter, the vector layer can use that set to skip ineligible candidates, decide whether exact search is cheaper, or choose a filter-aware ANN path. If the filter cannot be indexed, the database may be forced into slower scanning or less predictable post-filtering behavior.
Common payload index patterns
For equality filters, the index maps each field value to the IDs that contain that value. A filter such as doc_type = "invoice" can be answered by retrieving the ID set for invoices. For range filters, the index must support comparisons such as greater than, less than, or between. A filter such as created_at > 2026-01-01 may retrieve a sorted range of IDs or use segment-level pruning before more detailed checks.
For compound filters, the database combines multiple index results. A query such as tenant_id = 42 AND language = "en" AND created_at > 2026-01-01 may intersect an equality set for the tenant, another equality set for language, and a range-derived set for the timestamp. The final eligible set can then be passed into vector search as a mask, candidate list, or internal constraint.
Why indexing every field is not always wise
It is tempting to index every metadata field, but that can increase memory use, ingestion cost, and update overhead. Indexes must be built, stored, maintained, compacted, and kept consistent with vector records. High-cardinality fields such as unique document IDs may be useful for lookup but less useful for broad filtering. Very large text payloads may require a different indexing strategy than short categorical fields.
A practical system usually indexes the fields that appear frequently in filters, especially fields used for tenant isolation, permissions, time slicing, document type selection, and common application facets. Less common metadata can still be stored for display or occasional filtering, but queries over unindexed fields should be treated as potentially slower.
Payload indexes answer the logical part of the query. To make them efficient inside vector search, many systems represent filter results as compact sets of record IDs. Bitmap filtering is one of the most important ways to do that.
Bitmap Filtering and Candidate Masks
Bitmap filtering represents eligibility as a sequence of bits, where each bit corresponds to a record ID or internal point ID. If the bit is 1, the record is eligible for the filter. If the bit is 0, it is not. This simple representation is powerful because modern CPUs can combine large bitsets quickly using operations such as AND, OR, and NOT.
For example, imagine a collection with one million vectors. A bitmap for language = "en" has one million bits. A bitmap for visibility = "public" also has one million bits. To evaluate language = "en" AND visibility = "public", the database can perform a bitwise AND and produce a new bitmap containing only records that satisfy both conditions. This can be much faster than checking each record one by one.
Bitmap filtering is especially useful for categorical and boolean metadata because each value can be represented as a set of matching IDs. Compressed bitmap formats make this practical even when the collection is large, because long runs of zeros or repeated patterns can be stored compactly. The database can keep frequently used bitmaps in memory, build temporary bitmaps for query-specific filters, or combine bitmap results with range and text indexes.
How bitmap masks interact with vector traversal
During vector search, the bitmap can act as a candidate mask. When the search visits a vector ID, it checks the corresponding bit before doing expensive work. If the bit is 0, the system can skip adding that record to the result set and may also skip distance scoring, depending on the index and traversal algorithm. If the bit is 1, the candidate can be scored and considered for the top results.
This matters because vector distance calculations are often the most expensive part of query execution. Even when distance computation is optimized, checking a bit is usually cheaper than loading metadata, parsing a payload, or computing a full vector similarity score. A fast eligibility check gives the vector engine a way to avoid wasted work.
Where bitmap filtering becomes difficult
Bitmap filtering is not a complete solution by itself. A bitmap can say which records are eligible, but it does not automatically make an approximate vector index easy to search under a restrictive filter. If the eligible records are rare and scattered, a graph traversal may visit many ineligible nodes before finding enough matches. If the system refuses to traverse through ineligible nodes, it may disconnect useful paths through the graph. If it traverses through them but refuses to score them, it may still spend time navigating irrelevant regions.
This is why high-performance filtered vector search combines bitmap masks with query planning and filter-aware index traversal. The bitmap makes eligibility cheap to test. The execution engine still needs to decide how to search the eligible region efficiently.
Once the database has payload indexes and candidate masks, the next challenge is engineering the search path so latency stays predictable across different filter selectivities.
Engineering Fast Filtered Queries
Keeping filtered vector queries fast is an engineering problem across indexing, query planning, storage layout, caching, and operational tuning. The database must handle easy queries where many vectors match, hard queries where only a few vectors match, and mixed workloads where filters vary by tenant, time range, category, and permissions. A strategy that works for one filter selectivity may perform poorly for another.
Use selectivity-aware query planning
Filter selectivity means the fraction of records that match a filter. A filter that matches 80 percent of a collection is low selectivity. A filter that matches 0.1 percent is high selectivity. The database should estimate selectivity before choosing an execution strategy because the best plan changes dramatically.
For a highly selective filter, exact search over the filtered candidate set may be faster and more reliable than approximate graph traversal. If only a few hundred records match, scoring those vectors directly can return accurate results with predictable latency. For a broad filter, using the vector index normally with an eligibility mask may be faster. For a medium-selectivity filter, filter-aware graph traversal may be the best balance.
Integrate filters into ANN traversal
Filter-aware ANN traversal tries to avoid the common failure mode where the search path spends most of its time in areas that do not match the filter. In graph-based indexes, this can involve checking eligibility during traversal, seeding additional entry points that satisfy the filter, expanding through neighborhoods more intelligently, or using algorithms designed to reach filtered regions faster.
The goal is not simply to discard ineligible nodes. The goal is to preserve enough graph connectivity to find good eligible neighbors while reducing wasted scoring and result consideration. This is a subtle balance because aggressive pruning can hurt recall, while overly broad traversal can erase the latency benefit of filtering.
Keep metadata and vector IDs aligned
Fast filtering depends on stable internal IDs that connect payload indexes, bitmaps, and vector index nodes. When records are inserted, updated, deleted, or compacted, the system must keep these structures consistent. If a vector is removed from a segment, its filter bitmap entries and payload index references must no longer make it eligible. If a metadata field changes, the record must move between the correct index entries.
Many systems use segments, tombstones, background compaction, or versioned updates to avoid rewriting large indexes synchronously. This improves ingestion throughput but adds complexity. Query-time logic must ignore deleted records, respect the latest metadata state, and avoid returning stale candidates while background maintenance catches up.
Choose the right storage layout
Filtered search benefits when metadata needed for filtering is stored in a compact, column-oriented, or index-friendly layout. If every filter check requires loading and parsing a large JSON payload, query latency will suffer. Frequently filtered fields should be extracted into typed indexable columns or payload index structures rather than buried inside large blobs.
Storage layout also affects caching. Hot bitmaps, common tenant filters, permission masks, and recent time ranges can often be cached. Large vector payloads may remain on disk or in memory-mapped storage, while small filter structures stay memory-resident. This separation helps the database answer eligibility questions quickly without loading full objects.
Account for distributed execution
In a sharded or distributed AI database, the filter must be evaluated on each shard that may contain matching records. Each shard may produce its own top candidates, and a coordinator merges the results into a global top-k list. Filters can reduce shard work, but they can also create skew. One tenant or category may be concentrated on a few shards, causing uneven load.
Distributed systems need routing, shard-level statistics, and merge logic that preserve both relevance and filter correctness. If the query includes authorization filters, those filters should be enforced as close to the data as possible rather than only at the coordinator after results have already been retrieved.
These engineering details are easiest to understand through the lifecycle of a filtered query, from parsing to final result assembly.
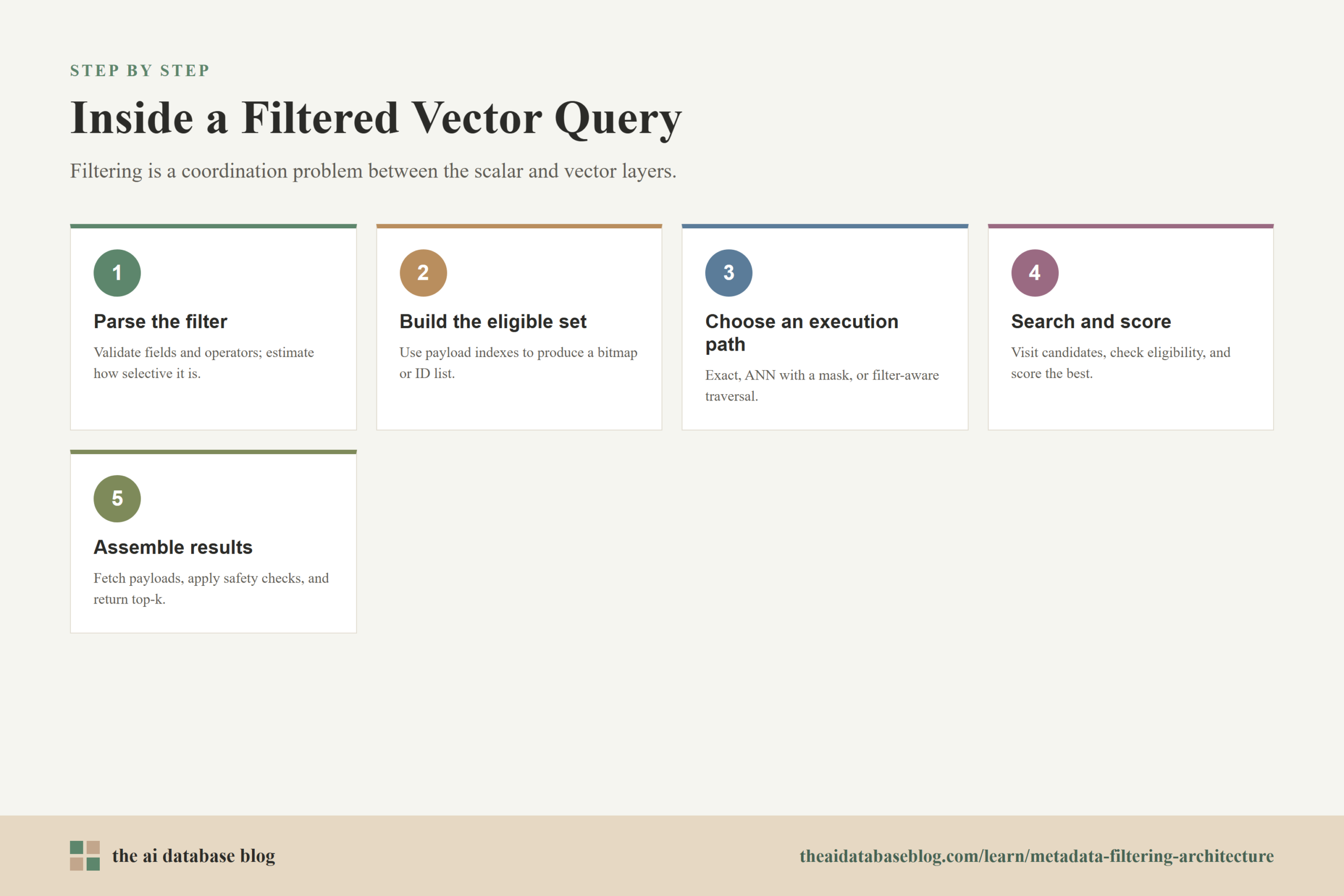
What Happens During a Filtered Vector Query
A filtered vector query begins when the application sends a query vector and a metadata condition. The database parses the filter expression, validates field names and operators, and checks which fields have indexes. It may also estimate how many records will match the filter using index statistics, cardinality estimates, segment metadata, or cached counts.
Next, the database builds or retrieves an eligibility representation. For equality filters, this may be a bitmap or posting list of matching IDs. For range filters, it may be a range scan converted into a candidate set. For compound filters, the system combines multiple intermediate sets using logical operations. The result is an internal view of which records are allowed to appear in the answer.
The planner then chooses an execution path. If the eligible set is tiny, the database may directly score all eligible vectors and return the nearest results. If the eligible set is broad, it may run the ANN index with a filter mask. If the filter is selective but not tiny, it may use filter-aware traversal, increase search breadth, or use additional entry points to find eligible candidates more reliably.
During execution, the vector engine visits candidate vectors, checks eligibility, computes similarity scores when appropriate, and maintains a top-k heap of the best matching eligible records. The engine may over-sample candidates, adjust search breadth, or continue traversal until it has enough confident results. Finally, the database fetches the requested payload fields, applies any final safety checks, and returns results sorted by similarity score.
This flow shows why metadata filtering is not just a query syntax feature. It is a coordination problem between the scalar index layer, vector index layer, planner, storage system, and result assembly path.
Design Patterns for Production Systems
Production AI applications should treat metadata filtering as part of retrieval architecture, not as an optional decoration on vector search. The most reliable systems model metadata intentionally, index the fields that control common retrieval boundaries, and test filtered queries under realistic workloads. This is especially important for RAG systems, where filtered retrieval often controls what information the model is allowed to see.
Model metadata around access and retrieval
Metadata should reflect the way the application actually queries data. Tenant ID, access group, document source, timestamp, language, region, product area, and content type are common examples because they often define retrieval boundaries. Fields used only for display do not always need to be filter-optimized, but fields used to decide what can be retrieved should be typed, normalized, and indexed deliberately.
Avoid unbounded high-cardinality filter patterns
High-cardinality filters are not automatically bad, but they need careful handling. A unique document ID, session ID, or user-specific permission value may create many tiny index entries. If most queries filter by these fields, the system may need partitioning, permission bitmaps, precomputed access masks, or application-level grouping to avoid excessive index overhead.
Benchmark with real filter selectivity
Filtered vector search performance can look excellent in broad queries and poor in narrow ones, or the reverse. Benchmarks should include the selectivity patterns the application will actually use: single-tenant queries, time-windowed queries, permission-limited queries, category filters, and combinations of these. Measure both latency and recall, because a fast filtered query is not useful if it misses relevant eligible records.
Separate authorization from convenience filters
Some filters improve relevance, such as language or document type. Others enforce security, such as tenant or access control filters. Security filters should be mandatory, consistently applied, and ideally enforced inside the database query rather than only after results return. Convenience filters can be tuned more flexibly, but authorization filters must be treated as correctness requirements.
These patterns reduce surprises, but filtered search still involves tradeoffs. Understanding those tradeoffs helps teams choose settings and data models that fit their workload.
Common Tradeoffs and Failure Modes
The hardest part of metadata filtering is that improvements in one area can create costs somewhere else. More indexes can make queries faster but ingestion slower. More aggressive ANN traversal can improve recall but increase latency. More selective filters can reduce the candidate set but make approximate graph navigation harder. A well-designed system makes these tradeoffs visible and tunable.
Latency versus recall
Filtered ANN search must often decide how long to keep searching for eligible candidates. Stopping early may return fast results but miss better matches. Searching more broadly may improve recall but increase latency. Parameters such as search breadth, candidate oversampling, exact fallback thresholds, and reranking depth help manage this balance.
Index memory versus query speed
Payload indexes, bitmaps, and cached masks consume memory. Keeping more of them in memory can make filtered queries faster, especially for common filters. However, memory is finite, and indexes compete with vector data, graph structures, caches, and application workload. Practical systems prioritize indexes for frequent and correctness-critical filters.
Flexible metadata versus typed filtering
Flexible metadata is convenient at ingestion time, but query performance often improves when important fields are typed and indexed. A field stored inconsistently as a string in some records and a number in others can complicate range filtering. A timestamp stored as free text may be hard to index efficiently. The more important a filter is, the more disciplined its schema should be.
Post-filter simplicity versus result completeness
Post-filtering is simple, but it can return fewer than the requested number of results when filters are restrictive. Over-fetching can help, but it is a workaround rather than a complete architecture. For critical filtered retrieval, especially tenant isolation and permission-aware RAG, the filter should be part of the search execution path rather than a final cleanup step.
The practical lesson is that metadata filtering should be evaluated as part of the full retrieval system. Query quality depends on embeddings and ranking, but filter performance depends on indexing, execution planning, and storage design.
Practical Checklist for Fast Metadata Filtering
A useful metadata filtering architecture starts with a clear understanding of the filters the application will actually use. The database can only optimize what it can represent, estimate, and execute efficiently. Teams should design metadata fields, indexes, and query patterns together rather than adding filters after the vector collection has already grown large.
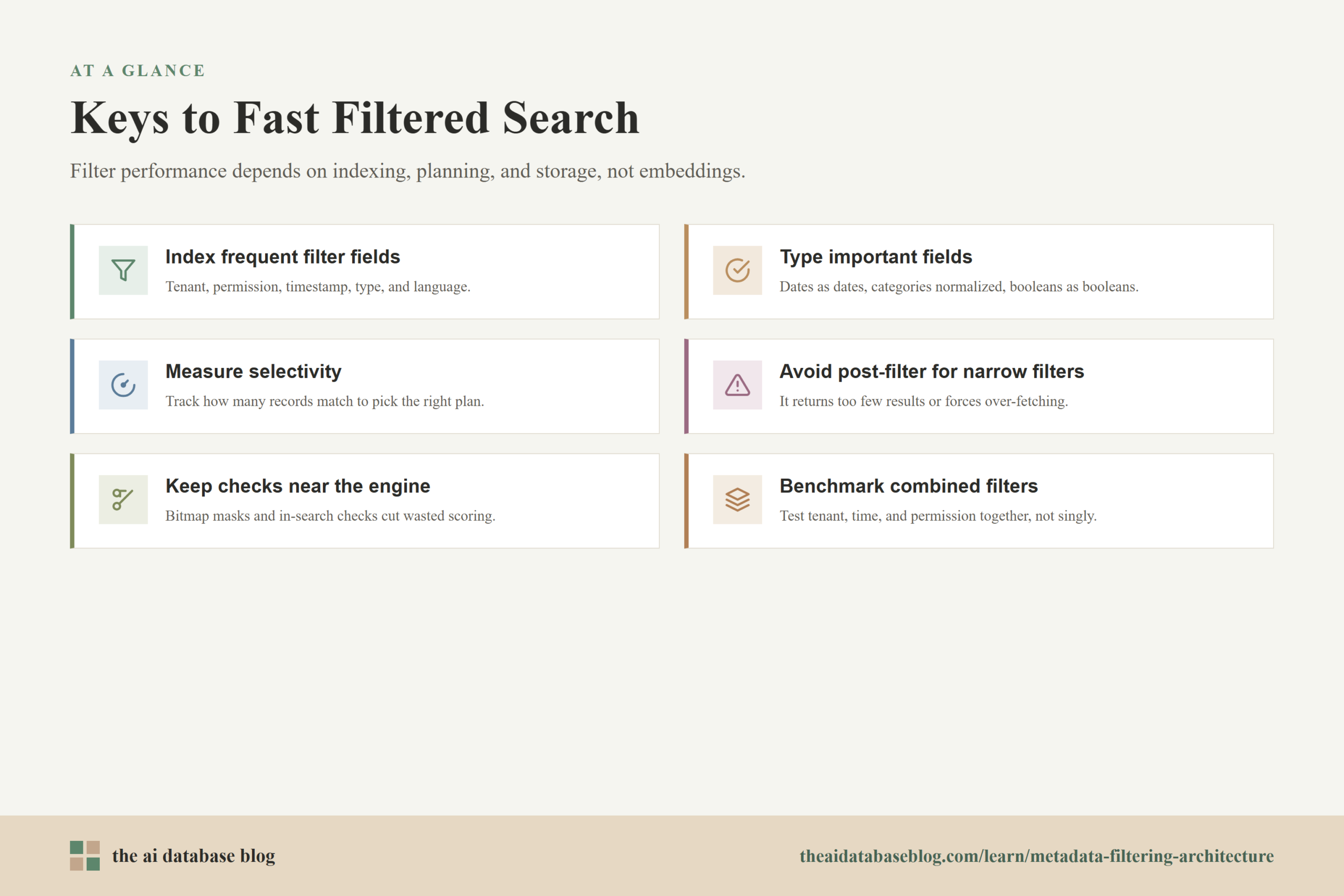
- Index frequent filter fields. Prioritize tenant, permission, timestamp, document type, category, language, and other fields that appear in common or mandatory filters.
- Use typed metadata for important fields. Store dates as dates or numeric timestamps, categories as normalized values, and booleans as booleans. Avoid inconsistent field formats for query-critical metadata.
- Measure filter selectivity. Track how many records match common filters. Use this information to choose exact search, ANN with masks, or filter-aware traversal.
- Avoid relying only on post-filtering for restrictive filters. If a filter often excludes most records, post-filtering can produce incomplete results or force expensive over-fetching.
- Keep filter checks close to the vector engine. Candidate masks, bitmap checks, and in-search filtering reduce wasted scoring and help maintain predictable performance.
- Benchmark combined filters. Real queries often include tenant, time range, permissions, and content type together. Test combinations, not only single-field filters.
- Plan for updates and deletes. Metadata changes must update payload indexes and candidate masks correctly. Background compaction and tombstones should not create stale filtered results.
With these practices in place, metadata filtering becomes a strength of the retrieval system rather than a source of unexpected latency or missing results.
FAQs
1. What is metadata filtering in an AI database?
Metadata filtering is the process of limiting vector search results to records that match structured conditions. The vector query finds semantically similar items, while the metadata filter enforces exact constraints such as tenant, category, timestamp, language, or access permission.
2. Is metadata filtering the same as keyword search?
No. Keyword search matches terms in text, while metadata filtering evaluates structured fields attached to records. A system can combine both, but a filter such as region = "EU" or created_at > 2026-01-01 is different from searching for words inside a document.
3. Why can filtered vector search be slow?
Filtered vector search can be slow because approximate vector indexes are optimized to navigate by similarity, not by arbitrary metadata conditions. If a filter excludes most vectors, the search may need to visit many ineligible candidates before finding enough eligible nearest neighbors.
4. What is a payload index?
A payload index is an index over metadata fields stored with vectors. It helps the database quickly find records that match a filter without scanning every payload. Payload indexes may use different structures depending on whether the field is categorical, numeric, temporal, textual, or list-valued.
5. How do bitmaps help metadata filtering?
Bitmaps represent matching record IDs as bits. The database can combine bitmaps with fast bitwise operations to evaluate filters such as AND, OR, and NOT. During vector search, the resulting bitmap can act as a candidate mask that quickly tells the engine whether a visited vector is eligible.
6. Should filters be applied before or after vector search?
It depends on the workload. Pre-filtering can be efficient for selective filters, but it can be difficult with approximate indexes. Post-filtering is simple but may return too few results for restrictive filters. Many production systems use in-search filtering or a planner that chooses between exact search, filter-aware ANN traversal, and broader candidate retrieval based on filter selectivity.
Takeaway
Metadata filtering architecture is the part of an AI database that makes semantic search practical, controlled, and production-ready. The key ideas are that filters must be evaluated alongside vector search, payload indexes make metadata conditions fast, bitmap masks provide cheap eligibility checks, and query planners must adapt to filter selectivity. This guidance is most useful for teams building RAG systems, multi-tenant search, permission-aware retrieval, or any AI application where results must be both semantically relevant and structurally valid for the user, context, or use case.
Watch this video to learn more