Vector databases scale by splitting large collections of embeddings into smaller pieces called shards, placing those shards across multiple nodes, and coordinating search across them. Sharding helps a system store more vectors than one machine can comfortably hold, speeds up ingestion by spreading writes, and gives operators a way to manage growth. The tradeoff is that every query may need to search multiple shards, merge partial results, and keep shard sizes balanced as the dataset changes.
This guide explains how sharding works inside vector databases, including how an index is split across nodes, how shard assignment strategies affect performance, how query fan-out and result merging work, and why shard balancing becomes important over time. By the end, you should understand the practical design choices behind distributed vector search and how those choices affect latency, recall, cost, and operational complexity.
What Sharding Means In A Vector Database
Sharding is a horizontal scaling technique. Instead of storing every vector in one index on one machine, the database divides the collection into multiple shards. Each shard owns a subset of the vectors and usually maintains its own local vector index, metadata index, and object storage. In a distributed cluster, those shards can be placed on different nodes so storage, memory, indexing work, and query work are spread across the system.
This matters because vector indexes can become large quickly. A retrieval application might store text chunks, image embeddings, user-specific documents, product records, support tickets, or multimodal objects. Each record may include a high-dimensional vector, metadata fields, and the original object payload. As the collection grows, the index may exceed the memory, CPU, disk, or operational limits of a single node. Sharding makes the collection behave like one logical dataset while physically distributing it.
A shard is not just a folder of vectors. In many vector databases, a shard is a searchable unit with its own approximate nearest neighbor structure, such as a graph-based or partition-based index. That means each shard can answer the question, “What are the nearest vectors in my local subset?” The distributed system then combines those local answers into a global answer for the application.
Sharding should also be separated from replication. Sharding divides data across nodes; replication copies the same shard to more than one node. Sharding increases the amount of data the cluster can hold and can improve write throughput. Replication improves availability and read throughput because another copy can serve traffic if a node is busy or unavailable. Many production systems use both, but they solve different problems.
Once the collection is divided into shards, the next question is how the split actually happens. That decision shapes how evenly the system uses resources and how much work each query must perform.
Splitting An Index Across Nodes
When a vector database splits an index across nodes, it turns one large logical index into several smaller physical indexes. Each shard receives a portion of the objects and builds or maintains an index over only those objects. If the cluster has four nodes and a collection has eight shards, the system might place two shards on each node. A query still targets the collection, but under the hood the database knows which shards hold which data.
This design lets each node work on a smaller search problem. Instead of one machine comparing a query vector against a very large index, several machines can search their local shard indexes in parallel. Each local index returns its best candidates, often with similarity scores, distances, metadata, and object identifiers. A coordinator then decides which of those candidates belong in the final top results.
Logical Collections And Physical Shards
The application usually interacts with a collection, namespace, or class, not with individual shards. The database hides most shard routing details so developers can insert and search records through a normal API. Internally, the cluster tracks a shard map that says which shard exists, which node hosts it, which replicas exist, and what health or load information is relevant.
This shard map is critical because vector search is latency-sensitive. If the coordinator has stale routing information, it may send work to the wrong node, miss a replica, or wait on a shard that has moved. Distributed vector databases therefore need cluster metadata, membership tracking, and failure handling in addition to the vector index itself.
Local Indexes Still Matter
Sharding does not remove the need for efficient local indexing. Each shard still needs an algorithm that can search its vectors quickly, such as a graph index, an inverted file structure, quantization-based search, or another approximate nearest neighbor method. The distributed architecture decides where the work runs; the local index decides how each shard performs the search.
This is why sharding strategy and index strategy should be considered together. A cluster can have many shards, but if each local shard is poorly tuned, query latency and recall can still suffer. Conversely, a strong local index may perform well on one node for a while, but eventually the dataset may grow large enough that distribution becomes necessary.
After the system knows how to split the index physically, it still needs a rule for assigning records to shards. That rule can be simple and uniform, or it can be based on meaningful attributes in the data.
Shard Assignment Strategies
Shard assignment is the rule that decides where a vector goes when it is inserted. The simplest strategies try to distribute records evenly so no node becomes overloaded. More deliberate strategies use metadata such as tenant, region, document type, project, or access pattern to keep related data together. The right choice depends on whether the main goal is even load, query pruning, data isolation, or operational control.
A good shard assignment strategy keeps the cluster balanced while preserving useful locality. Locality means that records likely to be searched together are stored together, or at least stored in a way that lets the database avoid searching irrelevant shards. Poor assignment can create hot shards, uneven memory use, expensive fan-out, and unnecessary result merging.
Random Or Hash-Based Assignment
Random assignment and hash-based assignment are common because they are simple and tend to spread records evenly. In a hash-based strategy, the database takes a stable value, such as an object identifier, applies a hash function, and maps the result to a shard. The goal is not semantic grouping; the goal is an even distribution of data and write load.
This approach works well when queries usually search the whole collection or when the system cannot predict which records will be queried together. It also reduces the risk that one shard grows much faster than the others because a popular category or tenant has more records than expected. For many general-purpose embedding collections, uniform distribution is a sensible default.
The tradeoff is that random or hash-based placement does not help the system narrow the search scope. If related records are scattered across all shards, a query may need to fan out to every shard to preserve recall. This can be acceptable when the number of shards is moderate and parallel search is efficient, but it becomes more expensive as the cluster grows.
Attribute-Based Assignment
Attribute-based assignment uses a meaningful field to decide where records belong. Examples include tenant ID, customer ID, region, language, product catalog, access group, or another metadata field that appears in many queries. If an application almost always searches within one tenant or one project, putting that tenant or project into a dedicated shard or partition can reduce unnecessary search work.
This strategy is especially useful in multi-tenant retrieval systems. If each customer has a separate data boundary, attribute-based sharding can support isolation and efficient deletion. A query that includes the tenant identifier can be routed to the relevant shard instead of searching the entire cluster and filtering afterward. That can reduce latency, lower compute cost, and make access control easier to reason about.
The main risk is skew. Some tenants, projects, or categories may be much larger or busier than others. If one attribute value maps to one shard, a large customer or a popular category can become a hot shard. The system may need split points, sub-shards, virtual shards, or rebalancing logic to keep that shard from dominating cluster resources.
Choosing Between Random And Attribute-Based Assignment
Random assignment is usually better when queries are broad, the data distribution is unpredictable, and even resource use is the priority. Attribute-based assignment is usually better when queries have a strong filter that is known at request time and that filter sharply narrows the search space. The key question is whether the application can reliably include the routing attribute in most searches.
For example, a support assistant that searches only within one customer’s documents is a strong candidate for tenant-based sharding. A public semantic search engine that searches across all indexed pages may benefit more from uniform distribution. A product search system may use a hybrid approach, distributing most data evenly while using metadata filters or partitions for high-value segments such as region or catalog.
Shard assignment determines where records live, but the next operational question is what happens when a user sends a search request. Distributed vector search usually has to coordinate work across shards and then assemble a single answer.
Query Fan-Out And Result Merging
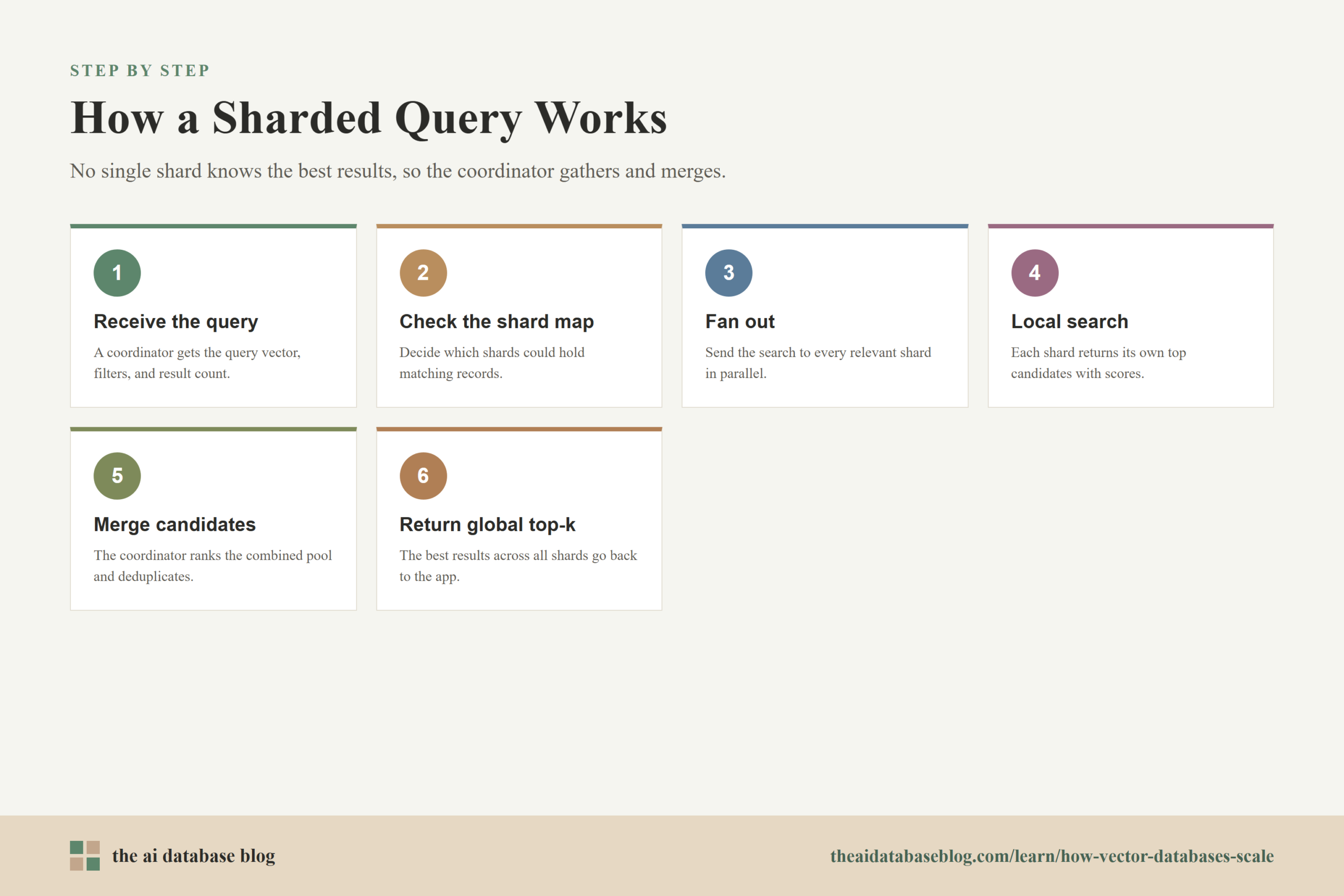
Query fan-out is the process of sending one search request to multiple shards. In a sharded vector database, no single shard necessarily knows the best results across the whole collection. Each shard can only search the vectors it owns. To produce a collection-level top result set, the database often sends the query vector and filters to several shards, receives local candidates from each shard, and merges them into a final ranked list.
This scatter-and-gather pattern is one of the central tradeoffs of sharded vector search. Parallel fan-out can make large searches possible, because multiple nodes work at the same time. But every additional shard adds coordination overhead, network traffic, partial result processing, and a potential source of tail latency. The slowest relevant shard can influence the end-to-end response time.
How Fan-Out Works
A typical distributed vector query begins at a coordinator. The coordinator receives the query vector, requested result count, filters, and any search parameters. It checks the shard map to decide which shards must be searched. If the query has no routing filter, the coordinator may send the search to every shard in the collection. If the query includes a selective attribute, the coordinator may send it only to shards that can contain matching records.
Each shard runs a local nearest neighbor search and returns candidate results. The local result count is often larger than the final requested count because the coordinator needs enough candidates to compare across shards. For example, if the application asks for the top 10 results, each shard may return its own top 10, top 20, or another configured candidate count. The coordinator then ranks the combined candidate pool and returns the global top 10.
How Result Merging Works
Result merging is the process of turning many local result lists into one global list. If all shards use the same vector metric and comparable scoring method, merging can be straightforward: collect candidates, sort by score or distance, apply final filters or deduplication, and return the best results. Hybrid search can be more complex because vector similarity, keyword relevance, metadata boosts, freshness, or business rules may need to be combined consistently.
The coordinator must also handle duplicate records, unavailable replicas, timeout behavior, and pagination. If the same shard is replicated, the database may query one replica or several replicas depending on consistency and latency goals. If a shard is slow, the coordinator may wait, retry, degrade gracefully, or return partial results depending on the system’s guarantees and the application’s tolerance for missing candidates.
Recall And Latency Tradeoffs
Fan-out affects both recall and latency. Searching every shard gives the system the best chance of finding the true nearest neighbors in the distributed collection, but it costs more. Searching only selected shards can be faster and cheaper, but only if the routing rule is correct for the query. If a query is routed too narrowly, relevant results outside the selected shard will never be considered.
This is why metadata filters and shard assignment need to match the application’s retrieval behavior. A tenant filter is usually safe when the application should only return that tenant’s data. A topical or category filter may be less safe if relevant content can appear in related categories. In those cases, the system may need broader fan-out, query expansion, or a two-stage retrieval design.
Fan-out and merging make sharded search possible, but they also expose a long-term maintenance problem. Data rarely grows evenly forever, and a once-balanced cluster can become uneven as users, tenants, and workloads change.
Balancing Shards As Data And Traffic Grow
Shard balancing is the process of keeping storage, memory, indexing work, and query load distributed across the cluster. A balanced system does not necessarily mean every shard has exactly the same number of vectors. It means no node or shard is carrying a disproportionate share of the cost relative to the others. In vector databases, balance must consider both data size and search behavior because a small shard with very frequent queries can be more expensive than a large shard with little traffic.
Balancing becomes important because real workloads are uneven. One customer may upload far more documents than others. One region may receive most traffic. One category may be queried constantly. New vectors may arrive in bursts, and old vectors may be deleted or updated. Without balancing, the cluster may appear healthy on average while one shard creates slow queries or indexing backlogs.
Common Causes Of Imbalance
Imbalance often starts with uneven data growth. Attribute-based sharding can make this more visible because one shard may correspond to one tenant, project, or category. Even hash-based sharding can become uneven if shard counts are too low, records are assigned before the cluster is expanded, or some shards receive more update-heavy workloads than others.
Traffic skew is another common cause. A shard may contain a popular subset of the collection and receive far more reads than other shards. This can increase CPU use, memory pressure, cache churn, and tail latency. In retrieval-augmented generation systems, this often appears when a small group of tenants or knowledge bases receives most user questions.
How Systems Rebalance Shards
Shard balancing can happen in several ways. A system may move whole shards from overloaded nodes to underused nodes. It may split a large shard into smaller shards. It may place new shards or new tenants on nodes with more available resources. It may increase replicas for hot shards so more nodes can serve read traffic. It may also use compaction or clustering processes to reorganize data inside shards so filters and segment pruning work better.
Moving shards is operationally delicate. The database has to copy data, rebuild or transfer index structures, update routing metadata, and avoid losing writes during the move. Large vector indexes may be expensive to move because they include both raw vectors and index state. Some systems therefore prefer to rebalance gradually, place new data more intelligently, or use virtual shard concepts that make reassignment smaller and less disruptive.
Balancing Storage, Memory, And Query Load
A useful balancing strategy looks at several signals together. Storage size shows how much data a shard owns. Memory use shows whether index structures and caches fit comfortably. Query rate shows which shards are active. Index build or compaction backlog shows whether writes are creating pressure. Tail latency shows whether users are experiencing slow responses even if average latency looks fine.
These signals help operators decide whether to add nodes, increase replicas, split shards, adjust routing, or change the data model. For example, if a tenant-based shard is too large, the application may need sub-sharding within that tenant. If broad queries are slow because they fan out to too many shards, the system may need stronger metadata pruning or a higher-level routing layer. If read traffic is the bottleneck, replication may be more effective than additional sharding.
Balancing is easier when the sharding model is chosen with the retrieval pattern in mind. The more clearly the system understands which data is searched together, the easier it is to place shards, route queries, and scale without unnecessary fan-out.
Practical Design Questions For Sharded Vector Search
Designing sharded vector search is less about choosing the largest possible shard count and more about matching the physical layout to the application’s query shape. A small number of large shards can be simple, but each shard may become expensive to search and move. A large number of small shards can improve placement flexibility, but it can also increase coordination overhead and operational complexity. The best design usually reflects the expected data size, filter patterns, update rate, and latency goals.
Before choosing a sharding strategy, it helps to ask how users actually search the data. If most queries include tenant, project, region, or permission boundaries, those fields can become strong routing signals. If users search across the whole corpus, uniform distribution and efficient scatter-gather search may be more important. If queries combine semantic similarity with strict metadata filters, the system should be able to push those filters down to shards instead of applying them only after retrieval.
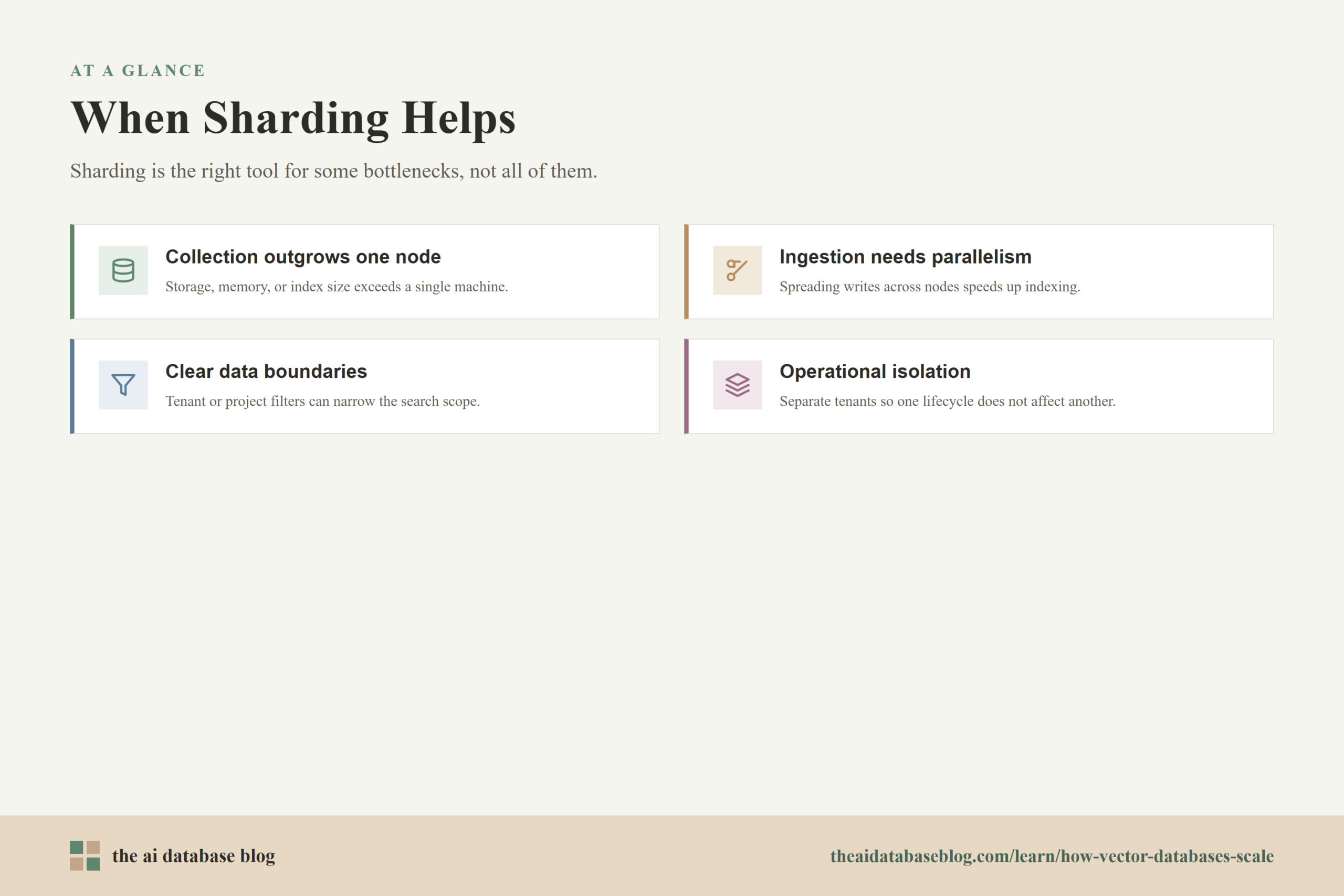
When Sharding Helps Most
Sharding helps most when the collection is too large for one node, when ingestion needs to be parallelized, or when the application has clear data boundaries that can reduce search scope. It is also useful when operational isolation matters, such as separating tenants or knowledge bases so one customer’s data lifecycle does not interfere with another’s.
Sharding is not automatically the answer to every performance problem. If the bottleneck is query throughput on a dataset that already fits comfortably on one node, replication may be the better tool. If the bottleneck is poor relevance, sharding will not fix weak embeddings, bad chunking, missing metadata, or inadequate reranking. If the bottleneck is too many broad queries, adding shards can sometimes make coordination more expensive unless the system also improves routing and pruning.
Signs The Sharding Strategy Needs Attention
A sharding strategy may need attention when query latency rises as the collection grows, when one node regularly uses more CPU or memory than the others, or when local shard searches return good candidates but the merged global results are inconsistent. Other warning signs include slow shard movement, long index build queues, frequent timeouts on broad queries, and metadata filters that do not reduce the number of searched shards.
In these cases, the fix may involve changing shard count, adding replicas, improving filter pushdown, changing assignment rules, or reorganizing data around a better partition key. The right answer depends on whether the pain is caused by storage growth, read traffic, write traffic, skewed tenants, or query patterns that no longer match the original data layout.
These operational details can feel abstract, so it is useful to connect them back to common AI application patterns. Sharding choices show up directly in how fast a retrieval system answers, how reliably it enforces data boundaries, and how easily it grows with new data.
Example: Sharding In A Multi-Tenant RAG System
Consider a retrieval-augmented generation application that stores documents for many organizations. Each organization uploads its own files, and users should only search within their organization’s content. In this case, tenant-aware sharding is often a natural fit because the tenant identifier appears in almost every query and represents a real access boundary.
When a document chunk is embedded, the database stores the vector with metadata such as tenant ID, document ID, timestamp, source type, and permissions. If the tenant ID is used for shard assignment or partition routing, a query from that tenant can search only the relevant shard or partition. That avoids scanning unrelated organizations’ data and reduces the risk of accidentally mixing results across tenants.
The design still needs balancing. Some tenants may have a few hundred chunks, while others may have millions. A large tenant might need multiple shards, while small tenants can remain lightweight. If one tenant becomes extremely active, the system may need replicas for that tenant’s shard to handle read traffic. If documents are deleted frequently, efficient shard-level deletion and compaction become important.
This example shows the core lesson: sharding is most effective when it reflects how the application retrieves data. The database can distribute work across nodes, but the application still needs a data model that gives the database useful routing information.
FAQs
1. What is a shard in a vector database?
A shard is a subset of a larger vector collection. It usually has its own local vector index, metadata index, and stored objects. In a distributed vector database, different shards can live on different nodes so the system can store and search more data than one machine could handle alone.
2. Does sharding make vector search faster?
Sharding can make large searches possible by spreading work across nodes, but it does not always make each query faster. If a query must search every shard, the system gains parallelism but also adds network and merge overhead. Sharding is most likely to improve latency when queries can be routed to a smaller set of relevant shards.
3. What is the difference between sharding and replication?
Sharding splits data across nodes, while replication copies the same data to multiple nodes. Sharding helps the database hold larger datasets and spread writes. Replication improves availability and can increase read throughput because more than one node can serve the same shard.
4. Why do vector databases fan out queries?
Vector databases fan out queries because each shard only knows about the vectors it stores. To find the best results across the full collection, the coordinator may need to send the query to multiple shards, collect local candidates, and merge them into one global ranking.
5. When is attribute-based sharding better than random sharding?
Attribute-based sharding is better when most queries include a reliable filter such as tenant ID, project ID, region, or another field that sharply narrows the search space. Random or hash-based sharding is usually better when queries are broad and the main goal is even distribution across the cluster.
6. What causes shard imbalance?
Shard imbalance happens when some shards become larger, busier, or more expensive to maintain than others. Common causes include large tenants, popular categories, uneven write patterns, frequent updates, and query traffic that concentrates on a small part of the collection.
Takeaway
Sharding helps vector databases scale by dividing a large embedding collection into smaller searchable units that can be placed across nodes. The most important design choices are how the index is split, how records are assigned to shards, how broadly queries fan out, how partial results are merged, and how the system keeps shards balanced as data and traffic change. This guidance is most useful for teams building retrieval systems, semantic search applications, and multi-tenant RAG products where the database must grow without sacrificing relevance, latency, or clear data boundaries.
Watch this video to learn more